Walking aids are critical for people with mobility impairments, yet current options remain unsatisfactory. Static knee braces are lightweight and affordable, but their rigid joints force users into unnatural gait patterns, leading to fatigue, reduced safety, and high abandonment rates. Robotic exoskeletons, in contrast, offer dynamic assistance that adapts to gait phases but rely on sensors, motors, and batteries that make them heavy, complex, and prohibitively expensive.
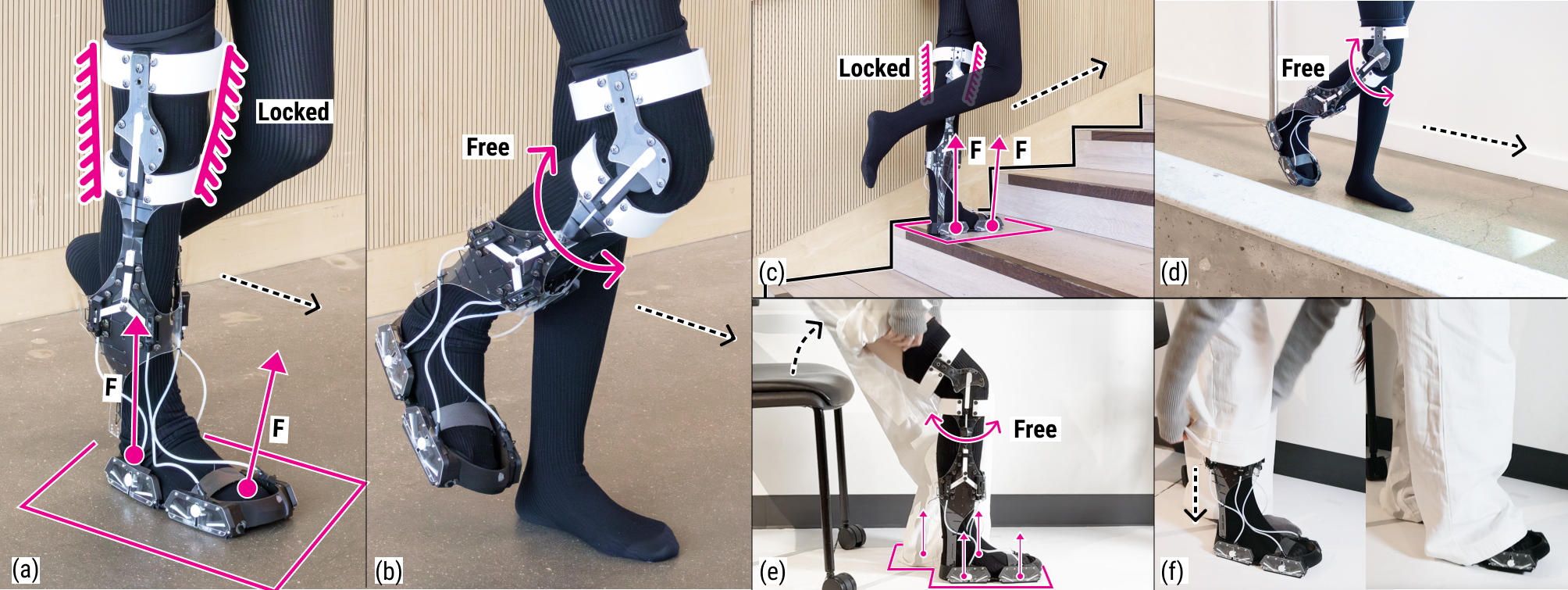
In this paper, we propose a fully passive knee exoskeleton design that combines the accessibility of static braces with the adaptive functionality of robotic systems. Our design employs a mechanical trigger under the foot to lock and release the knee joint in sync with the gait cycle, enabling more natural walking without electronics or actuation. Using human-centered methods, we conducted interviews with clinicians and orthosis users to guide our design and evaluated an early prototype as a design probe with stakeholders.
Publication
Yuyu Lin, Yujia Liu, Emma Kim, Alexandra Ion. 2026. Towards Accessible Mobility Support: User-Centered Design of a Passive, Multi-Functional, Low-Cost Knee Exoskeleton. In Proceedings of CHI ’26. Barcelona, Spain. April 13–17, 2026.. DOI: https://doi.org/10.1145/3772318.3791886